Treadle Sensing for Electronic Treadle Trackers
by Jerry Coopmans
While weavers using computerized dobby looms have enjoyed the advantage of weaving without concern for which treadle is being pressed at a given pick, the rest of us have to learn a new draft. Sometimes this means going very slowly at first or spending time unweaving. There must be a better way.
I've been exploring a concept for a smart electronic Treadle Tracker (eTT) for nearly a decade, but other activities kept this on the back burner.
The principle of an eTT is pretty simple; it determines which treadle on a loom is pressed by means of sensors and compares that to where one is supposed to be in a Weaving Information File (WIF)1. An indication is provided if one is pressing the correct or the incorrect treadle. In the case of a long treadling, an eTT can make the difference between success and failure.
The key concept of an eTT is to reliably determine which treadle is actually pressed. While obvious in concept, real world situations are often not so easy. Many looms have no fixed location for a treadle; they can move on the treadle rod horizontally or more likely they can sway considerably, so locating a reliable sensor can be tricky. Another issue is that often tie-ups can cause other treadles to fall sympathetically with the desired treadle, forcing software to guess which indication is correct. While there have been attempts at overcoming these issues, I have chosen an alternative method.
In the end, all one is really interested in is making sure the correct treadle is pressed for the current pick. My method is to detect which shafts are active. In general, shafts tend to be more positively located than treadles and are either up or down - not in some indeterminate position. So how does one know which treadle is pressed from the active shafts? The algorithm is simple - read the tie-up section of the WIF and match the active shafts with all possible tie-up combinations. If there is a match, then that is the active treadle, otherwise there is a mismatch. Methods of detecting shaft activation are many, including: micro-switches, reed, Hall effect and optical switches.
If the WIF is missing the tie-up and treadling sections, then the algorithm is a bit more involved. Since the liftplan is the logical product of the tie-up and the treadling, one can take the liftplan and factor it to eliminate redundant lifts and assigns treadles to each. From that point on, one proceeds as above.
In the end, weaving is about the shed generated by raising and/or lowering shafts. How they get there is immaterial; a compu-dobby raises and lowers shafts by mechanical means driven from a computer, for example. What is important is that the weaver can maintain their place in long treadling sequences with the minimum of stress. An eTT can do that; it can also assist with warping by displaying the correct shaft and color for each warp end. It can make the tie-up easy by verifying the correct shafts are active with the correct treadle. Alerting the user when a certain length of cloth has been woven can be very useful. Many other possibilities exist.
In the following images, a beta test version of an eTT shows four active shafts: 5, 6, 7, and 8 to the left of the tie-up. When there is match, the correct treadle (shown at the bottom of the tie-up) changes to green. If there is no match, the background is unchanged.

Fig. 1 Tie-up match for treadle 1.
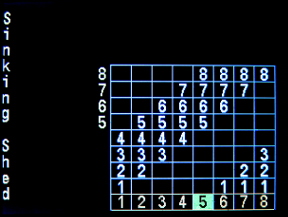
Fig. 2 Tie-up match for treadle 5.

Fig. 3 No tie-up match, so an error could be indicated either audibly or visually.
Please use the Contact link above if you have any comments or questions.
References
(1) The current WIF format was created in the late 90s by Ravi Nielsen with considerable help from a coalition of weaving software and equipment designers. It's an extensible file format designed to be read by nearly any computer and at the same time understandable by a human reader.
(2) This technique is now being used by the LoomPal.

Treadle Sensing for Electronic Treadle Trackers by Jerry Coopmans is licensed under a Creative Commons Attribution 4.0 International License. 12/2016